T2の技術

T2 Technology
AI技術と
車両開発技術の
融合によりトラックの
レベル4自動運転を実現
トラックは車両が大きいだけでなく、荷物の積載量によって重量や重心が異なるため、普通車とは違った制御技術が求められます。T2は、内製化された最先端AI技術と車両開発技術を組み合わせることで、安全走行を実現するテクノロジーの開発に取り組んでいます。
自動運転システムのレベル定義
T2は、物流課題の解決に向けて、特定の条件下で⼈間のドライバーに代わってシステムがすべての運転を⾏う「ドライバーレスの運転」、すなわち、レベル4自動運転トラックの開発を進めています。

レベル4自動運転トラックのコアテクノロジー
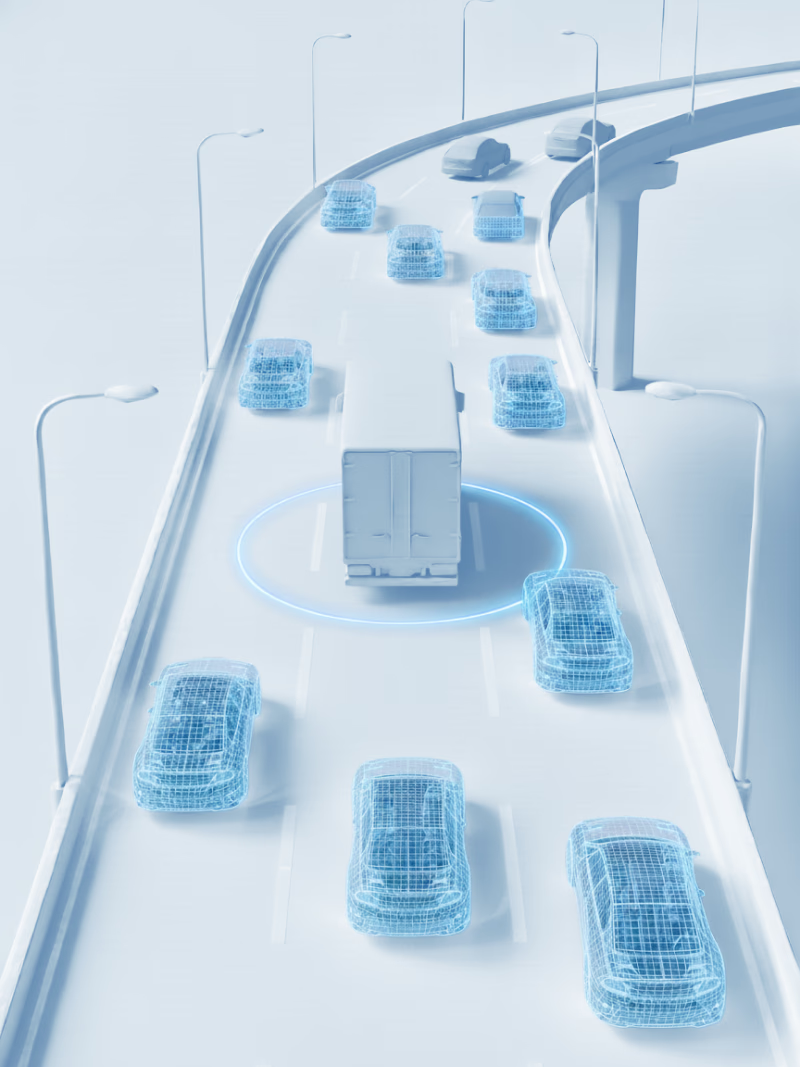
Bird-eye-view空間認識
LiDAR・カメラ・レーダーのセンサー情報を統合したAIモデルにより、夜間や雨天にも強い、360°の周辺環境把握を実現。
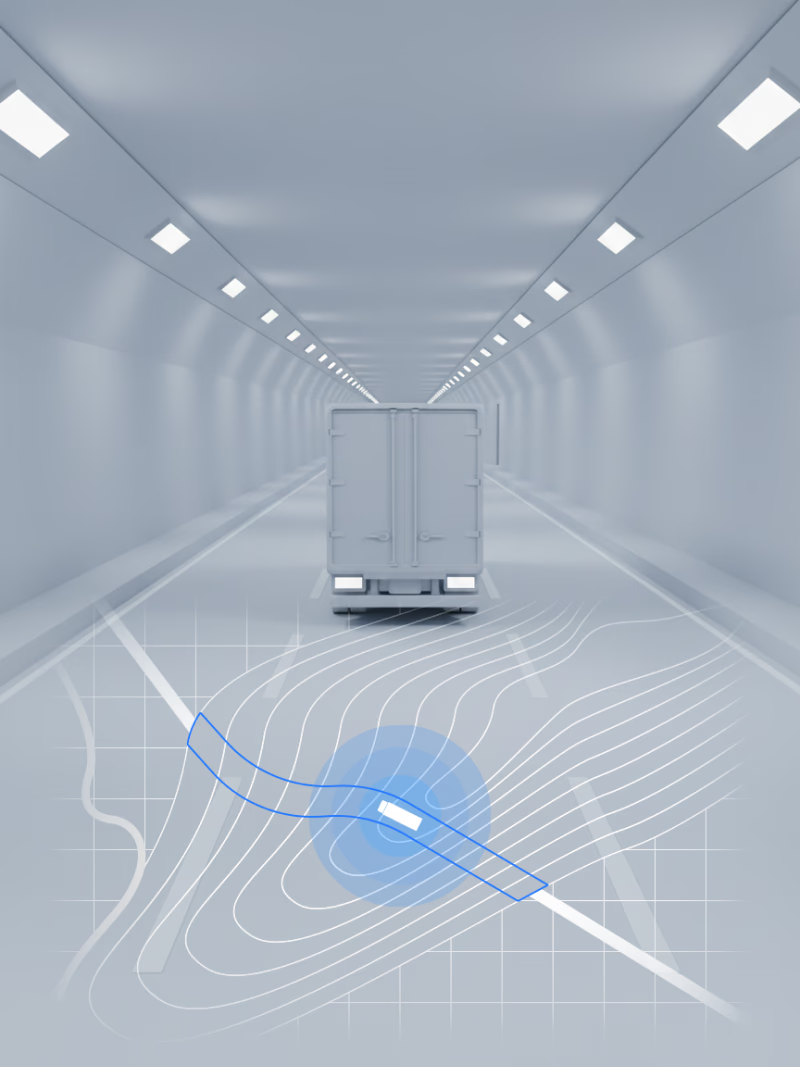
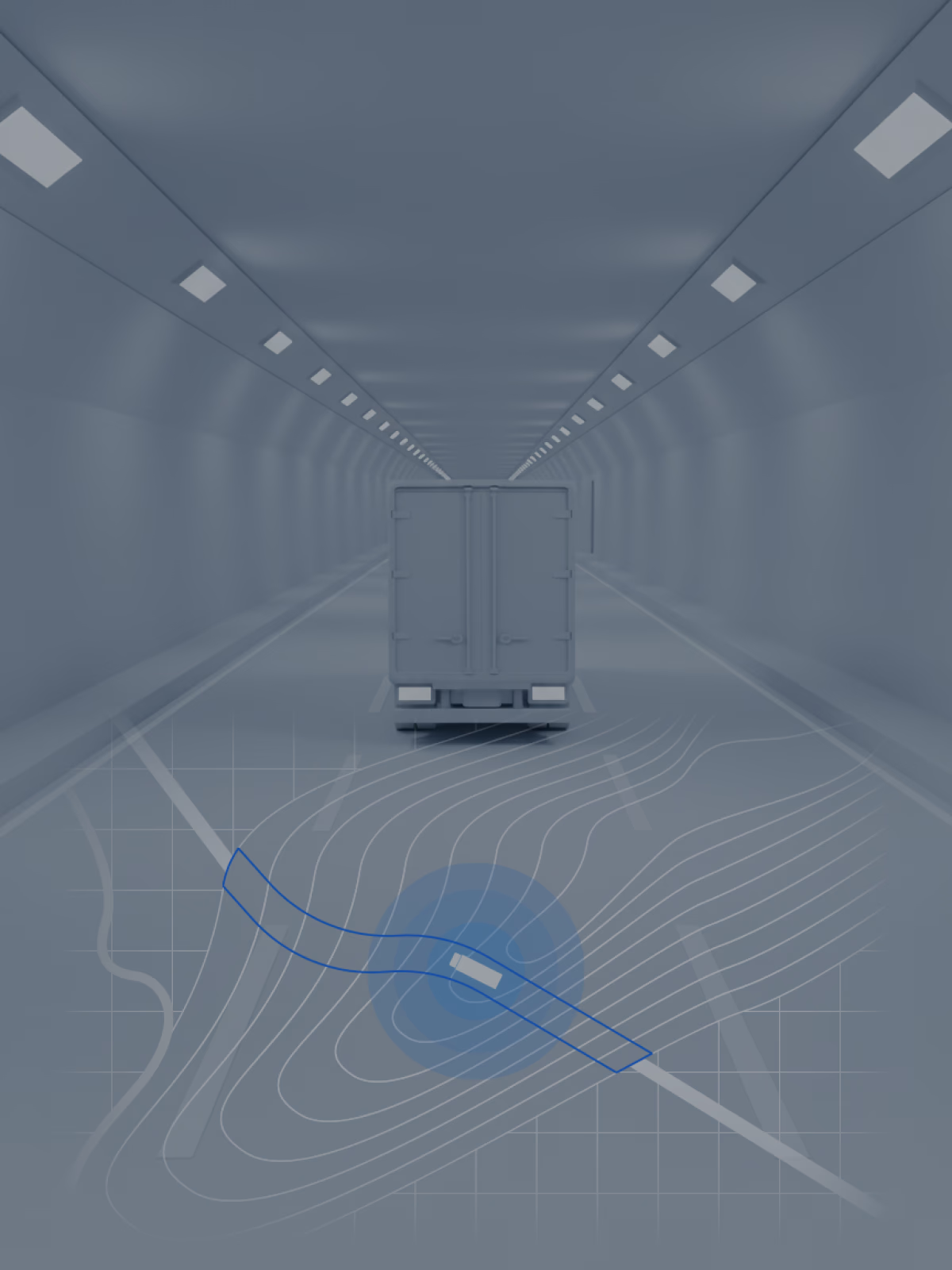
高精度自己位置推定
トンネルや施設内などGNSS信号の受信環境が悪い場所においても、IMUと高精度点群地図マッチングの統合により、グローバルな位置推定が可能。

VLMによるシーン理解
VLM(視覚言語モデル)を活用し、工事による車線規制など車両の走行に影響を与えるイベントを早期に検出。確実な車線変更を促す。
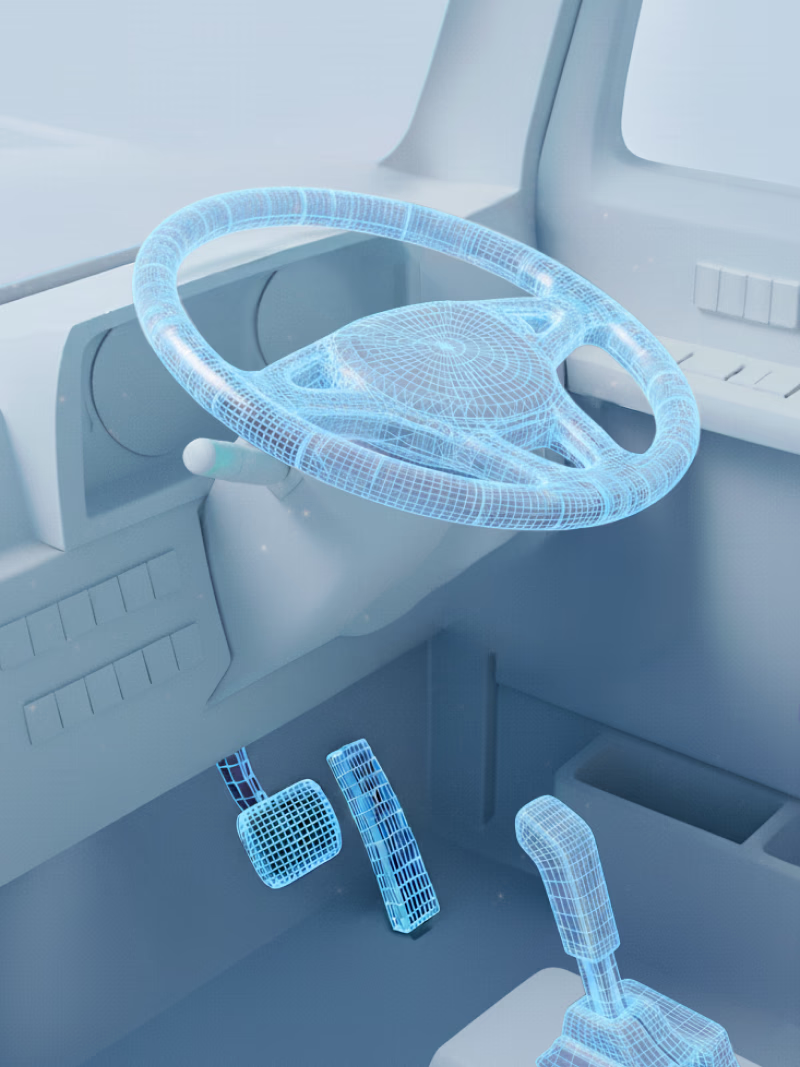
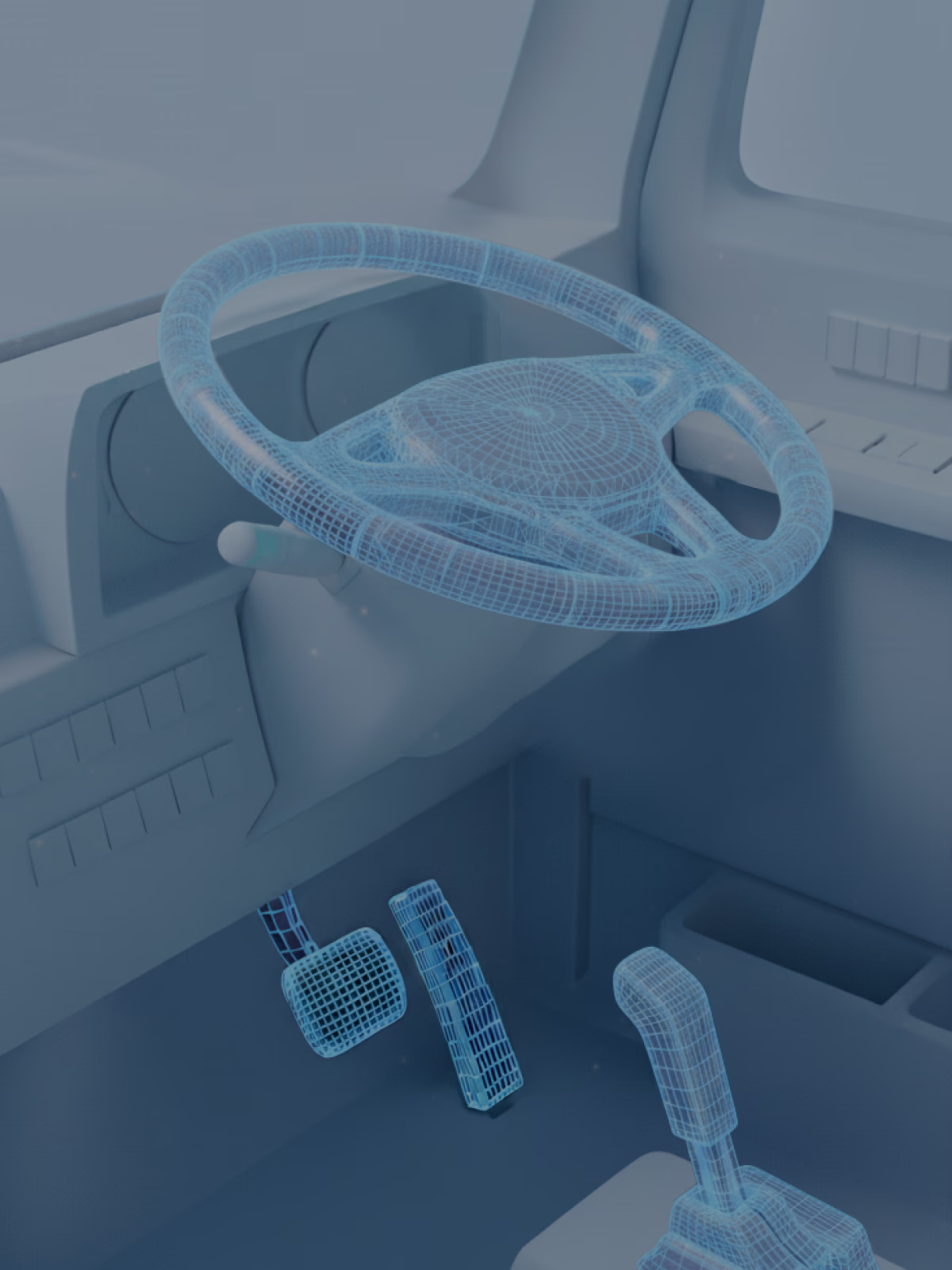
大型車の車両運動制御
荷物の積載量・積載物のばらつき、タイヤの種類(夏/冬/Mix)、車両個体の違いがある中でも、安定性/追従性の高い制御技術を構築。
自動運転アーキテクチャ
安全性に配慮した設計とテクノロジー
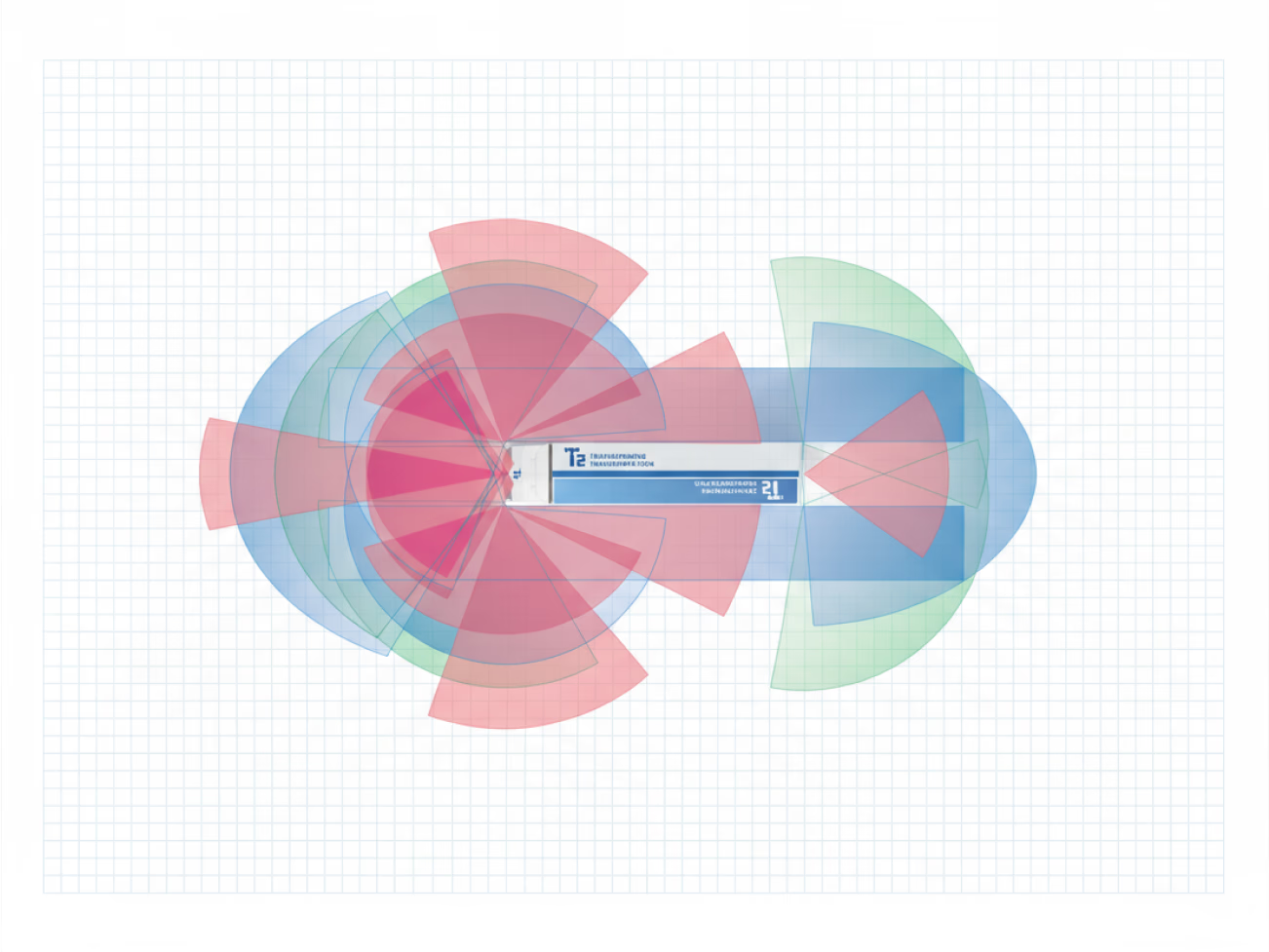
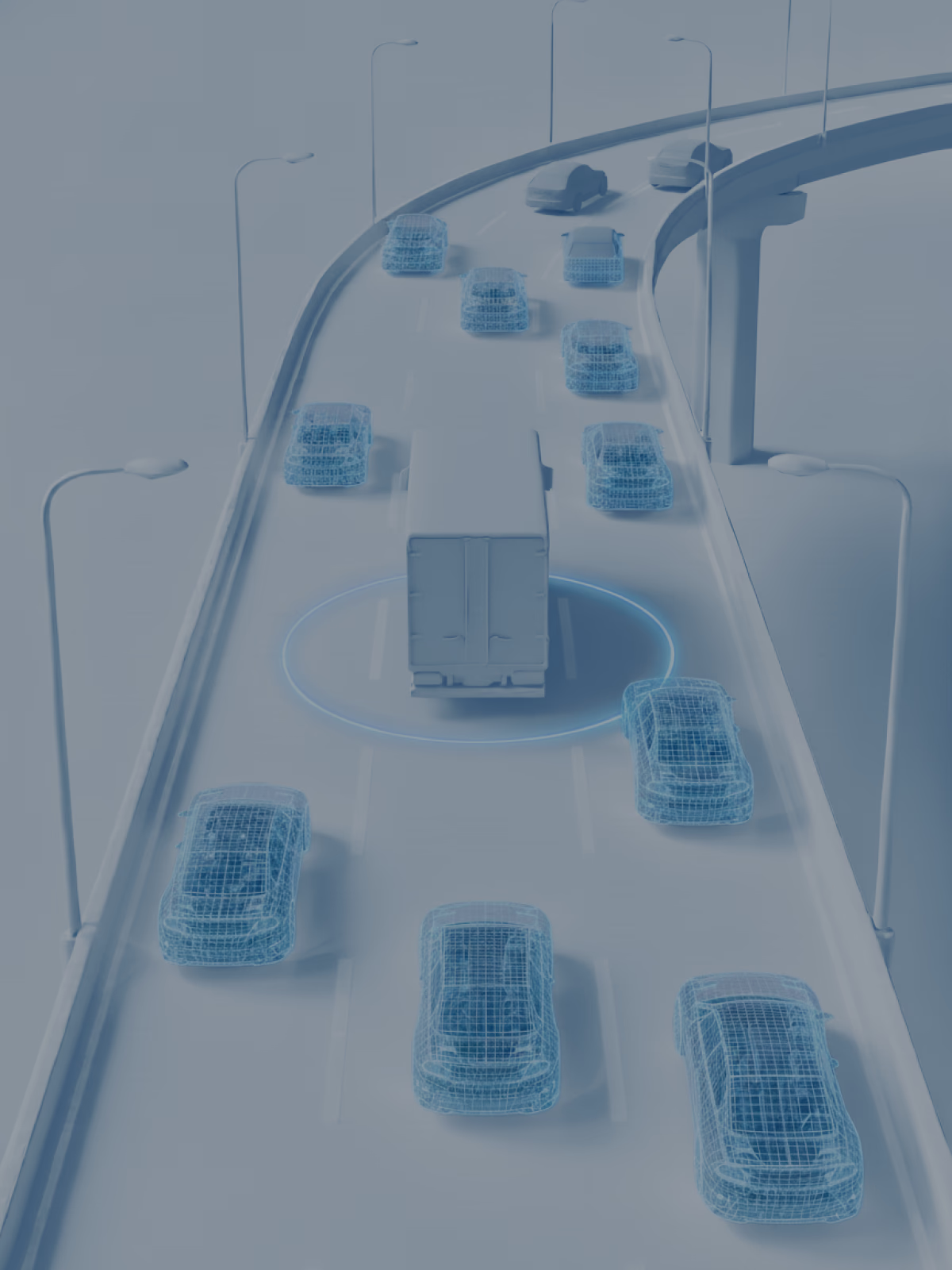
死角をなくすセンサー群
T2のトラックは、複数のカメラ、LiDAR、レーダーでセンシング。これらのデータをフュージョンさせて、高い精度で周囲の物体認識が可能になり、死角なくトラックの全方位を認識。
走行時の安全性
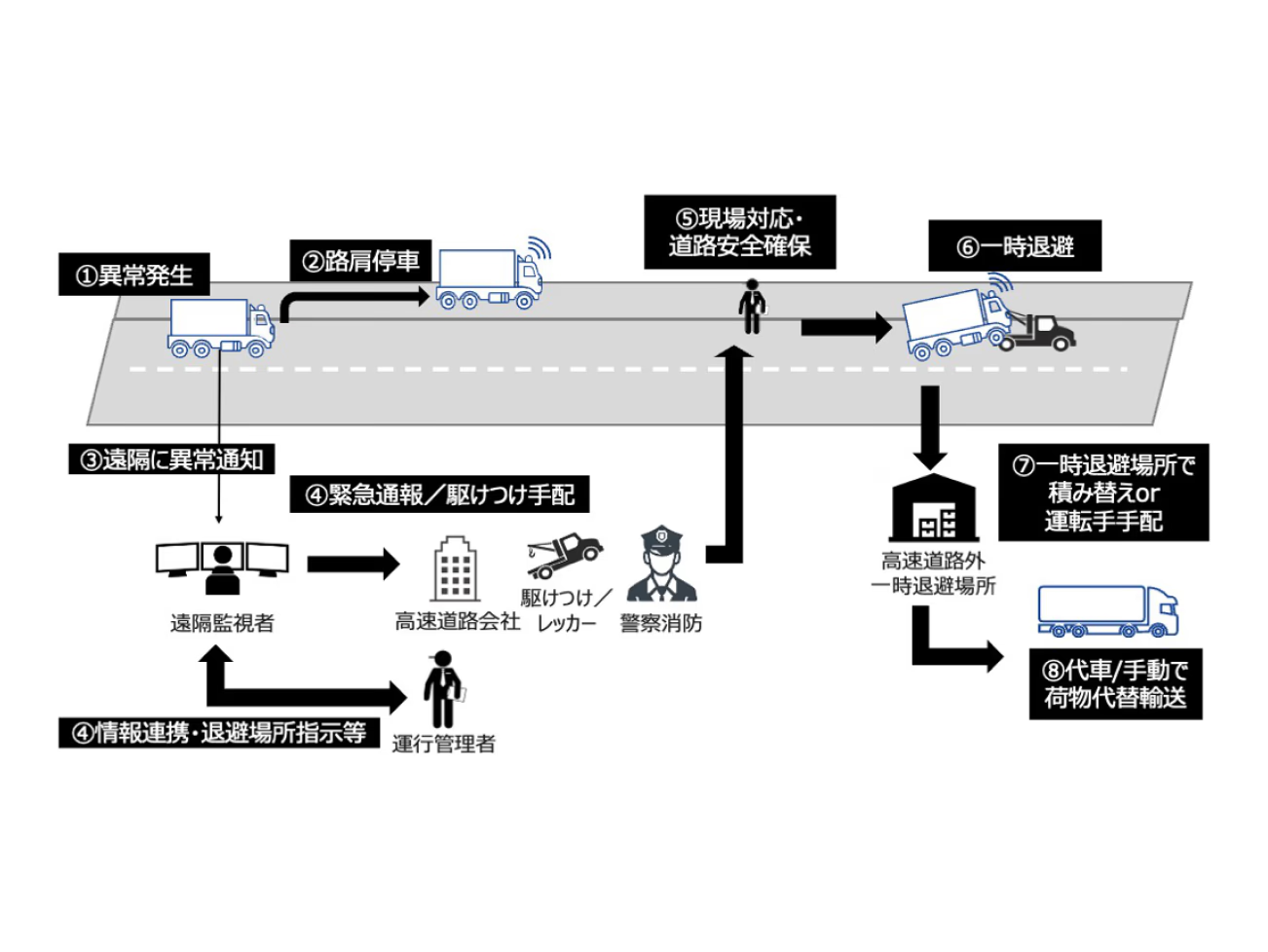
異常・トラブル発生時の安全確保体制
レベル4自動運転トラックは無人状態での走行を前提としており、事故や故障などの緊急時には、遠隔監視体制によって監視者が通報し関係機関と連携して迅速に対応するとともに、安全に停止できる仕組みを開発しています。この仕組みによって走行時の安全性を確保しています。
安全性の証明に向けた取り組み

高速道路での確実な実証
T2は、レベル2自動運転トラックとして日本国内で最長となる、神奈川県綾瀬市から兵庫県神戸市までの高速道路区間約500キロを走破する実証に成功しています。
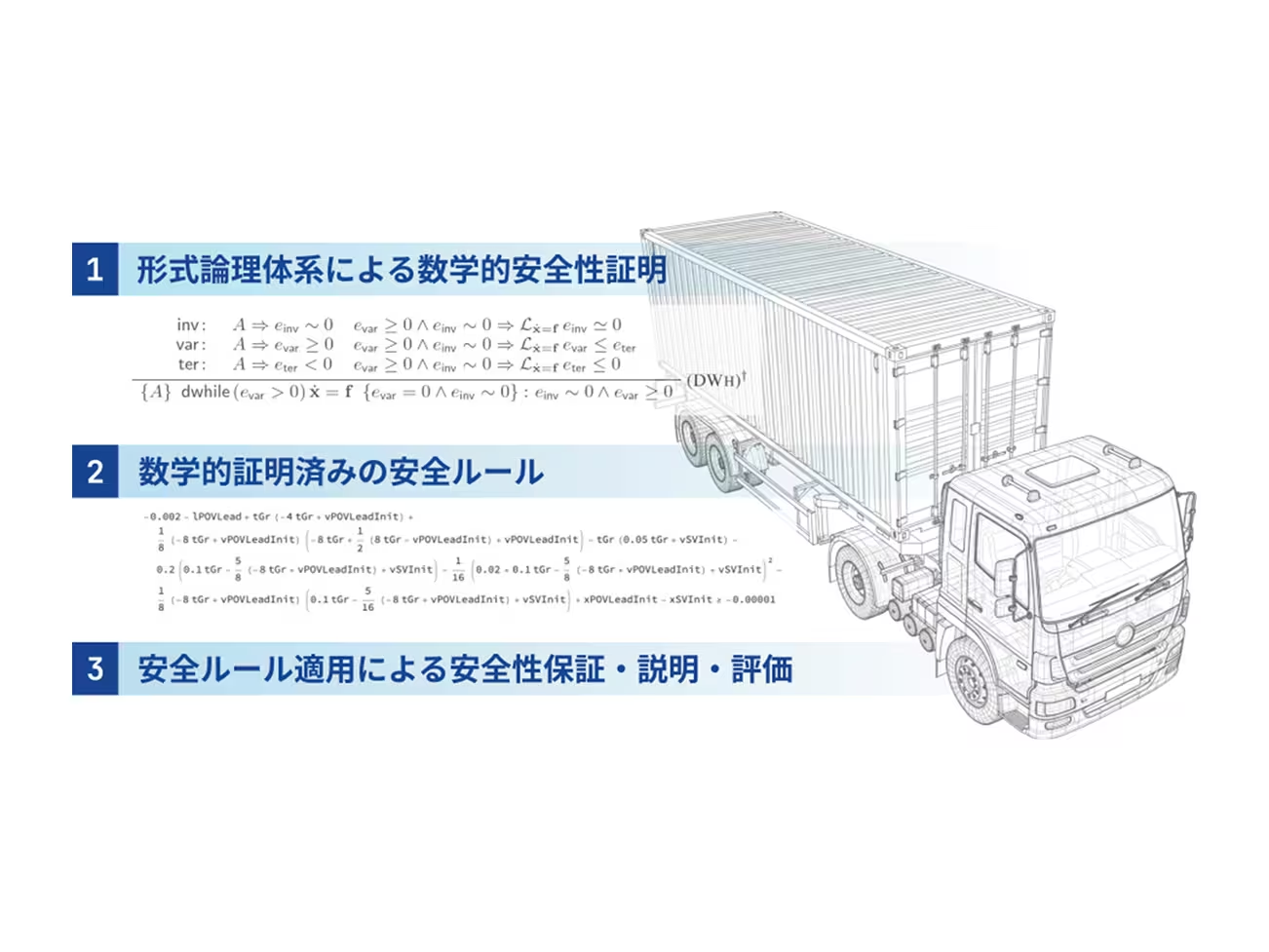
数学的アプローチによる安全性評価・論理的説明性
従来の安全評価は「1,000万km 走行して事故がなかった」という統計的な実証アプローチが中心でした。これに対し、T2では、安全性の論証において先進的な理論と実績を持つ株式会社イミロンと連携し、「形式手法(formal methods)」を用いて、衝突回避や安全停止といった運転シナリオを数学的にモデル化し、「必ず安全である」ことを論理的に導き出すことによる、安全論証の強化および社会実装に向けた安全性説明フレームの構築を進めています。







